Les IMU MEMS de haute précision sont souvent moins performantes après intégration. Dérive, désalignement et facteurs environnementaux altèrent progressivement la précision, jusqu'à l'apparition de défaillances sur le terrain. Respectez quatre règles : alignement rigoureux, environnement contrôlé, étalonnage périodique et fonctionnement rigoureux, pour préserver une précision optimale.
Les IMU MEMS de haute précision offrent des performances de détection de mouvement inégalées, mais uniquement si elles sont utilisées correctement. Cet article révèle quatre erreurs d'utilisation critiques qui entraînent souvent une perte de précision, et comment les éviter lors d'une intégration en conditions réelles.
Les centrales inertielle MEMS de haute précision sont essentielles à la navigation moderne, des drones aux véhicules autonomes. Pourtant, même les capteurs haut de gamme ne peuvent fonctionner correctement s'ils sont mal utilisés. Ce guide expose les pièges cachés qui compromettent discrètement la précision et montre comment les intégrateurs peuvent les éviter.
Table des matières
Installation : le point de départ de chaque IMU MEMS de haute précision
Montez-le de manière rigide, pas souple
Une IMU MEMS ne signale que son propre mouvement ; elle doit donc se déplacer exactement comme la plateforme. Pour des résultats fiables, fixez l'unité directement sur une structure rigide à l'aide de supports en métal ou en fibre de carbone. Évitez les patins en caoutchouc ou autres matériaux souples qui fléchissent ou absorbent les vibrations : ils brisent la liaison mécanique et corrompent les données du capteur.
Si l'isolation des vibrations est inévitable, concevez-la avec soin et vérifiez que les caractéristiques d'amortissement ne déforment pas la fréquence de sortie ou la réponse de phase de l'IMU.
Alignez parfaitement les axes
Même un léger décalage angulaire peut engendrer des erreurs de positionnement importantes. Un désalignement d'un seul degré d'une centrale inertielle MEMS de haute précision peut atteindre des kilomètres après une utilisation prolongée. Alignez toujours les axes de la centrale inertielle avec le référentiel du véhicule ou effectuez un étalonnage d'alignement précis après l'installation.
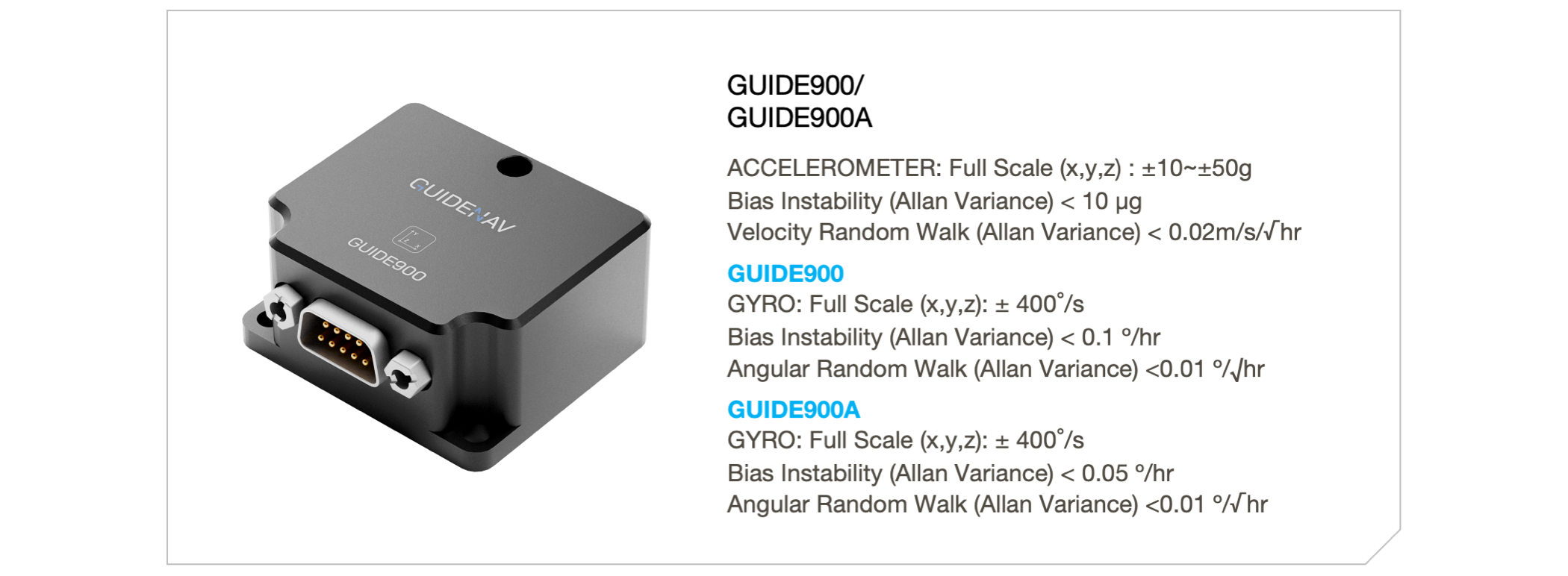
Le GuideNav MEMS IMU GUIDE900 est étalonné en usine avec une non-linéarité du facteur d'échelle inférieure à 100 ppm et un couplage transversal inférieur à 200 ppm — mais un mauvais alignement d'installation peut rapidement annuler cette précision.
Restez à l'écart des zones de vibrations et de stress
Les vibrations continues ou les contraintes structurelles altèrent progressivement les caractéristiques internes d'une centrale inertielle MEMS. Évitez de monter le capteur à proximité de moteurs, de boîtes de vitesses ou de soudures. À terme, ces influences mécaniques peuvent entraîner une dérive de polarisation et réduire la stabilité à long terme.
Contrôle environnemental : l'ennemi caché de la précision de l'IMU
La stabilité de la température est primordiale
La température est la cause la plus fréquente de dérive dans une IMU MEMS de haute précision. Chaque capteur possède une plage de fonctionnement thermique définie, généralement comprise entre −40 °C et +85 °C. Des fluctuations soudaines peuvent modifier le biais du zéro ou le facteur d'échelle.
Maintenez l'IMU MEMS dans un environnement stable grâce à une isolation, un flux d'air contrôlé ou des éléments chauffants si nécessaire. Toutes les IMU MEMS GuideNav sont entièrement compensées en température sur toute leur plage, garantissant une précision constante dans des conditions extrêmes.
L'humidité peut endommager silencieusement la précision
L'humidité est une autre menace invisible. Lorsque l'humidité dépasse 85 % HR, elle peut s'infiltrer dans le boîtier, corroder les circuits et modifier le comportement du capteur. Même une condensation de courte durée peut provoquer des sauts de polarisation temporaires. Protégez toujours l'IMU haute précision à l'intérieur d'un boîtier étanche avec des dessiccateurs lors de son utilisation en climat marin ou tropical.
Éviter les interférences électromagnétiques (EMI)
Les lignes à courant élevé et les convertisseurs de puissance à découpage peuvent injecter du bruit dans le circuit d'entrée analogique d'une IMU MEMS. Pour éviter toute interférence, séparez le câblage d'alimentation des lignes de signaux, maintenez une mise à la terre adéquate et utilisez des câbles blindés. Un environnement électromagnétique propre est aussi important que la stabilité mécanique pour garantir une précision à long terme.
Étalonnage : la bouée de sauvetage d'une centrale inertielle MEMS de haute précision
L'étalonnage en usine ne dure pas éternellement
Chaque IMU MEMS quitte l'usine étalonnée en termes de biais, de facteur d'échelle et d'orthogonalité, mais ces paramètres fluctuent au fil du temps en raison des cycles de température, des vibrations et des contraintes mécaniques. Pour qu'une IMU de haute précision conserve ses performances conformément aux spécifications, prévoyez un réétalonnage périodique tous les 6 à 12 mois, voire plus fréquemment pour les systèmes critiques.
Choisissez la bonne approche d'étalonnage
Si le retrait de l'IMU n'est pas pratique, effectuez un étalonnage embarqué ou en temps réel à l'aide de routines d'alignement statique ou d'une estimation assistée par GNSS.
Cependant, la restauration complète de la précision nécessite un étalonnage en laboratoire sur une table de mesure ou une chambre thermique. Cette méthode corrige les six axes et compense les dérives liées à la température, garantissant ainsi à l'IMU MEMS des performances de niveau tactique dans tous les environnements.
Vérifiez toujours le résultat
L'étalonnage n'est pas terminé tant qu'il n'est pas vérifié. Comparez les données post-étalonnage avec les profils de mouvement de référence ou les capteurs de référence pour confirmer la stabilité et la précision.
Négliger la vérification peut laisser des erreurs cachées qui dégradent silencieusement les performances, ce qui va à l’encontre de l’objectif du réétalonnage.
Fonctionnement et manipulation : la précision réside dans les détails
Réchauffez-vous avant de faire confiance aux données
Une IMU MEMS a besoin de temps pour atteindre sa stabilité thermique et électronique après sa mise sous tension. La plupart des IMU de haute précision nécessitent une période de préchauffage de 1 à 30 minutes, selon le modèle et l'environnement. Une collecte de données trop précoce peut entraîner un biais temporaire plusieurs fois supérieur à sa valeur nominale.
Évitez les cycles d'alimentation fréquents
L'activation et la désactivation répétées de l'IMU réinitialisent ses filtres internes et introduisent des variations de polarisation transitoires. Maintenez l'IMU MEMS sous tension en permanence pendant la collecte de données critiques afin de garantir des performances constantes et une continuité des données transparente.
Manipuler avec précaution — toujours
Malgré leur conception robuste, les IMU MEMS de haute précision présentent des microstructures fragiles. Les chutes, les chocs ou une mauvaise manipulation peuvent entraîner une dégradation subtile mais permanente de la précision. Pendant le transport, utilisez des conteneurs rembourrés et des connecteurs sécurisés. Inspectez régulièrement les câbles, les supports et les boîtiers : des contraintes mécaniques ou un câblage mal serré précèdent souvent la dérive du capteur.

GuideNav Expert Insight
Chez GuideNav, nous avons constaté comment un simple oubli – montage incorrect, étalonnage manqué ou dérive thermique – peut transformer une centrale inertielle MEMS de haute précision en un capteur peu fiable. L'intégration concrète ne se résume pas à des spécifications ; il s'agit de rigueur dans l'installation, l'étalonnage et la maintenance à long terme.
C'est pourquoi les IMU MEMS GuideNav sont conçues pour les intégrateurs professionnels qui exigent une précision constante et éprouvée sur le terrain. Chaque unité est entièrement compensée en température, étalonnée orthogonalement et protégée par un boîtier robuste en aluminium conçu pour résister aux vibrations et aux conditions environnementales les plus difficiles.
Que votre projet implique des drones, des véhicules autonomes ou de la robotique industrielle, l'application des bonnes pratiques permettra à votre IMU MEMS de fonctionner exactement comme prévu : stable, fiable et prêt pour les travaux critiques de la mission.
